Fonctions affines et équations de droites (Vidéo 1)
Propriété 1 :
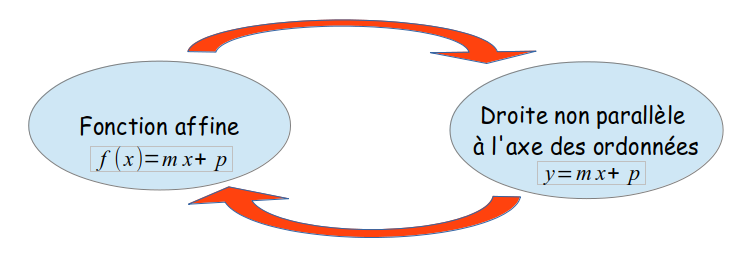
La représentation graphique d'une fonction affine du type $f(x)=mx+p$ une est une droite non parallèle à l'axe de ordonnées.
Définition 1 :
Cette droite a donc une équation de la forme $y=mx+p$ où $m$ est le coefficient directeur et $p$ est l'ordonnée à l'origine $(x;y)$ sont les coordonnées des points appartenant à la droite. Soit $(d):y=mx+p$ On a l'équivalence : $M(x;y)\in (d) \iff y=mx+p$
Exemple 1 :
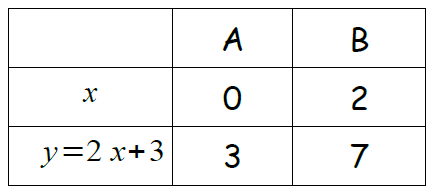
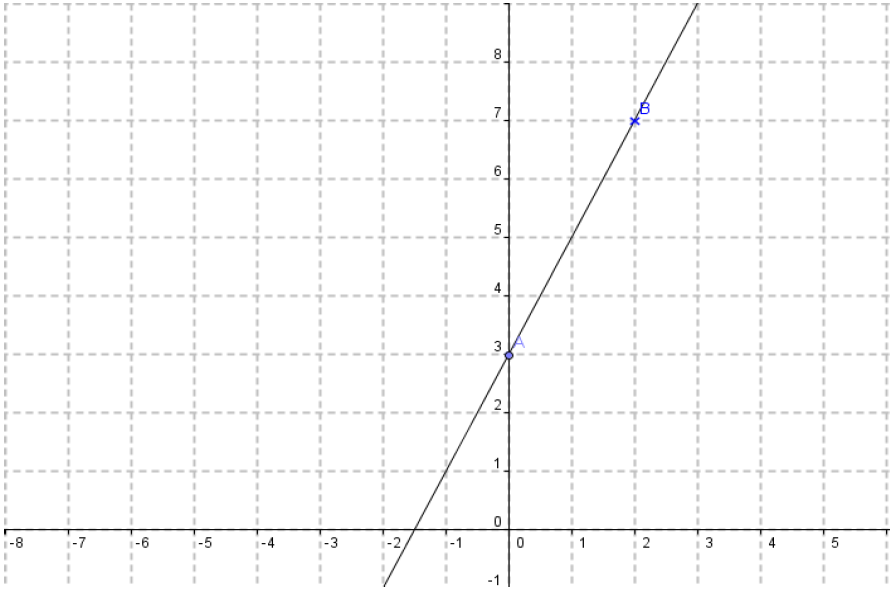
Soit $f$ la fonction affine défine par $f(x)=2x-3$. Sa représentation graphique est la droite $(d)$ d'équation : $(d) : y= 2x-3$ L'intérêt de ce chapître n'est pas d'étudier cette droite comme représentation graphique d'une fonction, comme cela a été effectué dans le chapitre sur les fonctions affines. L'idée est d'étudier la droite elle-même, en tant qu'objet du plan, de comprendre ses propriétés. Mais évidemment, pour les droites "non-parallèles à l'axe des ordonnées", les droites "obliques", on pourra utiliser les propriétées graphiques des fonctions affines.
On cherche les coordonnées de deux points de la droite : ${\textbf{Première idée :}}$ On peut présenter les résultats dans un tableau : $\textbf{Deuxième idée :}$ On peut le rédiger de façon plus lycée : • si $x=0$, alors $y=2\times 0+3=3$, on a donc $A(0;3)\in (d)$ • si $x=2$, alors $y=2\times 2+3=7$, on a donc $B(2;7)\in (d)$
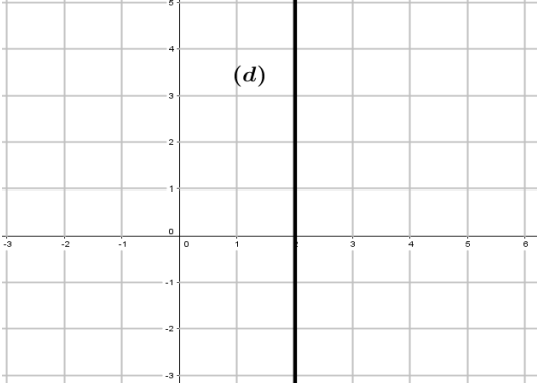
Toute droite parallèle à l'axe des ordonnées ne peut être la représentation graphique d'une fonction, puisqu'un antécédent ne peut avoir plusieurs images.
${\textbf{Conséquence}}$ : Une droite parallèle à l'axe des ordonnées ne peut pas s'écrire sous la forme $y=mx+p$
L'ensemble des points de cette droite ont en commun la même abscisse. Une équation de cette droite se résume donc en : $x=2$
Propriété 2 :
Toute droite parallèle à l'axe des ordonnées à une équation du type $x=a$ avec $a$ l'abscisse commune à tous les points de la droite.
Approche graphique du coefficient directeur et de l’ordonnée à l’origine : (Vidéo 4)
Propriété 1 :
Si $(d)$ est une droite d' équation $y=mx+p$ alors • $m$ est le $\textbf{coefficient directeur}$. Il mesure la pente de la droite c’est à dire l’inclinaison par rapport à l’horizontal (axe des abscisses) Graphiquement, cela correspond au quotient : $m=\dfrac{\text{Dénivellé vertical}}{\text{Distance horizontale}}$ • $p$ est appelé l'$\textbf{ordonnée à l'origine}$. Il mesure "l’étage" où la droite coupe l’axe des ordonnées.
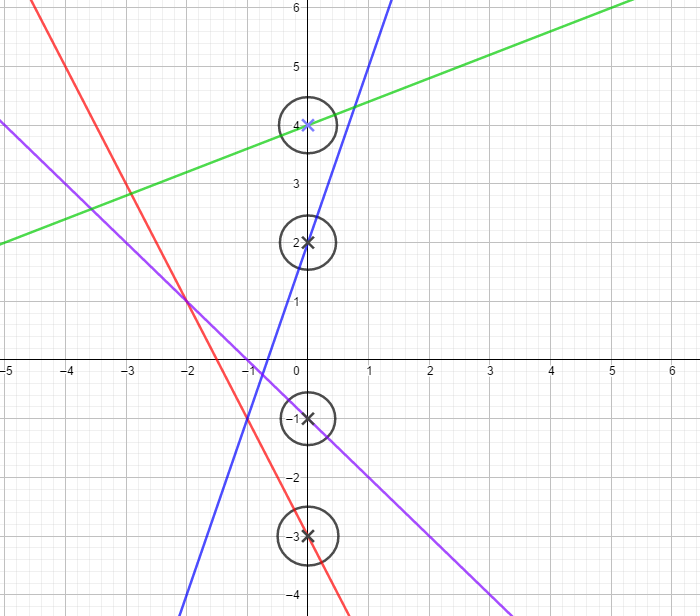
Méthode :
${\textbf{Pour lire l'ordonnée à l'origine :}}$ On lit l'ordonnée du point de la droite qui est sur l'axe des ordonnées.
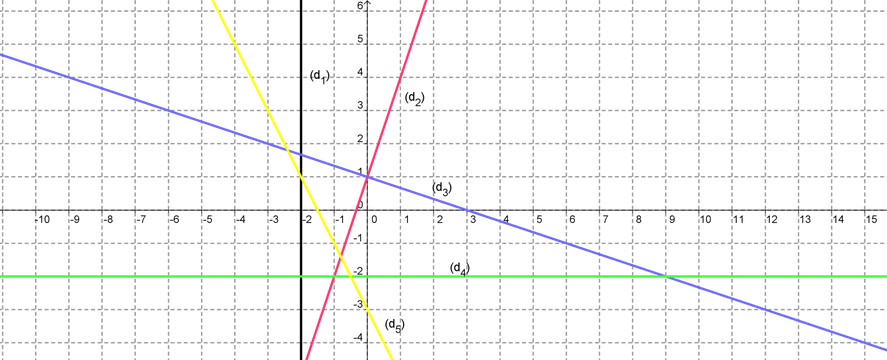
On lit pour la droite verte : $p=4$ , pour la bleue : $p=2$ , pour le violete : $p = -1$ et pour la rouge $p=-3$
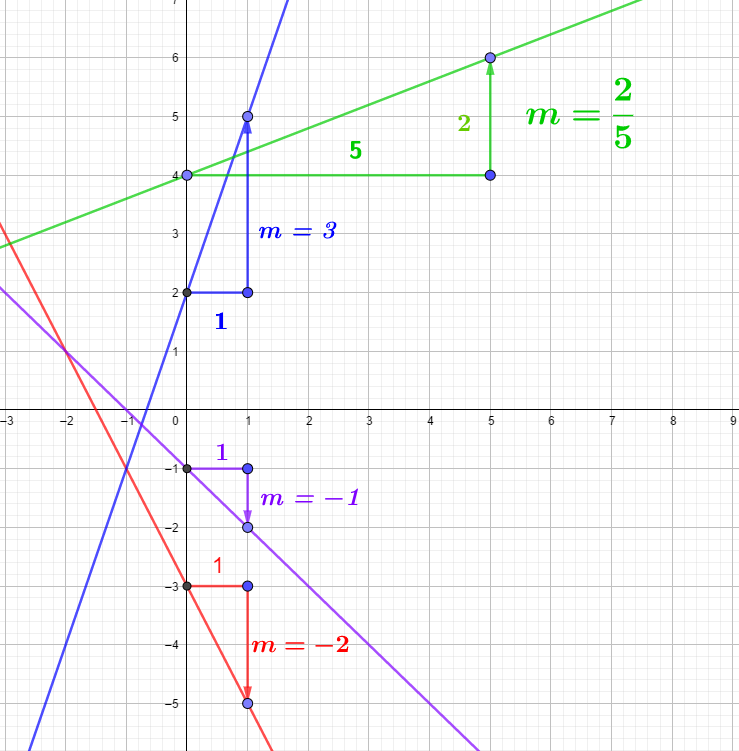
Méthode :
${\textbf{Pour lire le coefficient directeur :}}$ A partir d'un point quelconque de la droite, quand on se déplace d'une unité horizontalement sur la droite, le coefficient directeur vaut la mesure algébrique de la distance à la droite. On parle de "mesure algébrique" pour signifier que si on monte la distance sera positive, mais que si on decsnd, la "distance" sera négative.
On lit pour la droite bleue : $m=3$ , pour le violete : $m = -1$ (attention au signe) , pour la rouge $m=-2$ et pour la verte, $m=\dfrac{2}{5}$ on utilise la relation : $m=\dfrac{\text{Dénivellé vertical}}{\text{Distance horizontale}}$ ${\textbf{Pour définir l'équation de droite :}}$ Verte : $y=\dfrac{2}{5}x+4$ ; bleue : $y=3x+2$ ; violete : $y=-x-1$ ; rouge : $y=-2x-3$
Comprendre :
Représenter, sans justifier dans le repère ci-contre, les droites suivantes : $(d_1) : y=-2x+1$ $(d_2) : y=3x-1$ $(d_3) : y=\dfrac{1}{3}x+2$
Correction :
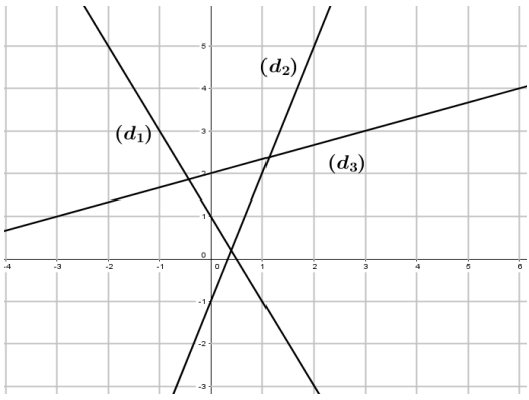
Méthode :
Sans justification, donner une équation réduite des 5 droites tracées dans le repère ci-contre : (Vidéo 5)
Soit $A(x_A;y_A)$ et $B(x_B;y_B)$ (avec $x_A\neq x_B$ , i.e. la droite $(AB)$ est non parallèle à l'axe des ordonnées) La droite $(AB)$ a pour coefficient directeur $m=\dfrac{y_B-y_A}{x_B-x_A}$
${\textbf{Remarque}}$ : C’est la même formule que celle déterminée pour une fonction affine :$m=\dfrac{f(v)-f(u)}{v-u}$ pour $u\neq v$
Méthode :
Déterminer, si possible, le coefficient directeur de la droite $(AB)$ passant par les points $A(2;1)$ et $B(5;2)$
Correction : On vérifie que $x_A\neq x_B$ Donc la droite $(AB)$ a pour coefficient directeur $m=\dfrac{y_B-y_A}{x_B-x_A}=\dfrac{2-1}{5-2}=\dfrac{1}{3}$ Le coefficient directeur de la droite $(AB)$ est donc $\dfrac{1}{3}$
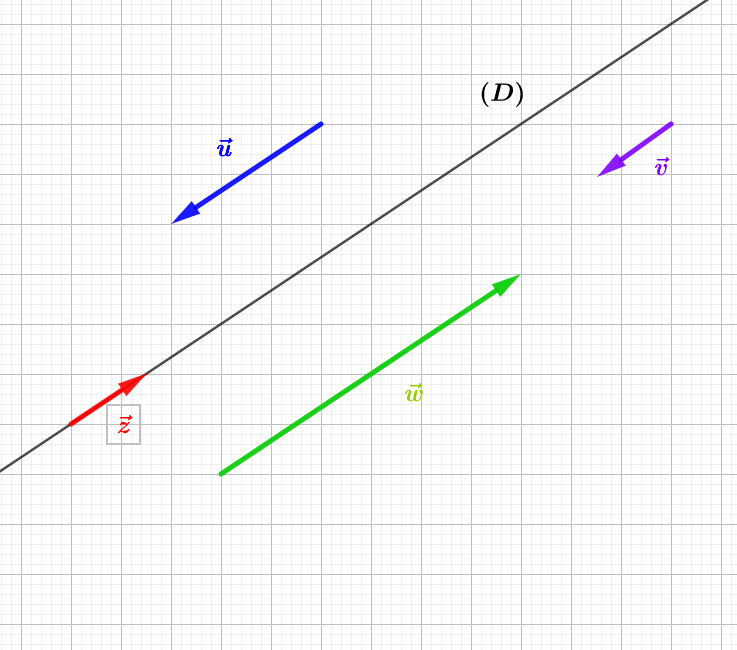
Si $(D)$ est une droite du plan, on appelle vecteur directeur de $(D)$, tout vecteur non nul $\vec u$ qui possède la même direction que la droite (D).
Exemple 1 :
Dans cette situation, les vecteurs $\vec{u}$, $\vec{v}$, $\vec{w}$ et $\vec{z}$ ont tous la même direction que la droite $(D)$. Ils "portent" cette droite, ce sont tous des vecteurs directeurs.
${\textbf{Remarque :}}$ Une droite possède une infinité de vecteur directeur.
Propriété 1 :
Soit $A$ et $B$ deux points distincts du plan . $\vec u$ est un vecteur directeur de la droite $(AB)$ $\iff$ $\overrightarrow{AB}$ et $\vec u$ sont colinéaires
Propriété 2 :
Une droite d'équation $y=mx+p$ possède comme vecteur directeur le vecteur $\vec u\begin{pmatrix}1\\m\end{pmatrix}$ Une droite d'équation $x=a$ possède comme vecteur directeur le vecteur $\vec u \begin{pmatrix}0\\1\end{pmatrix}$
${\textbf{Démonstration :}}$ Soit $(D)$ une droite d'équation $y=mx+p$. En posant $x=0$, puis $x=1$, on obtient $(A(0;p)$ et $B(1;m+p)$ deux points de la droite $(D)$ $\overrightarrow{AB}$ est alors un vecteur directeur de la droite $(D)$ $\overrightarrow{AB} \begin{pmatrix}{x_B-x_A~~}\\{y_B-y_A~~}\end{pmatrix}\iff\overrightarrow{AB} \begin{pmatrix}1\\m\end{pmatrix}$ On procède de même pour une équation verticale.
On appelle équation générale ou équation cartésienne d'une droite, une équation de la forme $ax+by+c=0$ où $a$ et $b$ ne pouvant pas être nuls en mêmetemps.
Propriété 1 :
Toute droite du plan admet une équation cartésienne.
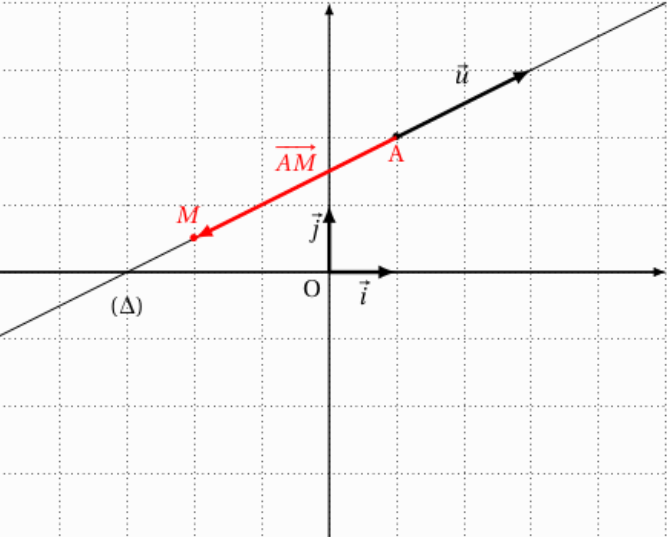
${\textbf{Démonstration Fondamentale:}}$ Soit $A(x_A;y_A)$ et $\vec u \begin{pmatrix}\alpha\\\beta\end{pmatrix}$ respectivement un point et un vecteur d'un plan muni d'un repère orthonormé. On a $\alpha$ et $\beta$ qui ne peuvent être tous les deux nuls, pour éviter que $\vec u$ ne soit un vecteur nul. Soit $M(x;y)$ un point de la droite $(\Delta)$ passant par le point $A$ et ayant $\vec u$ comme vecteur directeur. Le vecteur $\overrightarrow{AM}$ porte aussi la droite $(\Delta)$ , il est donc aussi un vecteur directeur de $(\Delta)$.
$\overrightarrow{AM}$ et $\vec u$ sont donc des vecteurs colinéaires, leur déterminant est donc nul. On a : $\overrightarrow{AM} \begin{pmatrix}{x-x_A~}\\{y-y_A~}\end{pmatrix} \iff \overrightarrow{AM} \begin{pmatrix}{x-x_A~}\\{y-y_A~}\end{pmatrix}$ Donc :$M(x;y)\in(\Delta) \iff Det\left(\overrightarrow {AM},\vec u\right)=0$ $\iff \begin {vmatrix} x-x_A~~&\alpha~~~~\\ y-y_A~~&\beta~~\end{vmatrix}=0$ $\iff (x-x_A)\times \beta - \alpha(y-y_A) =0$ $\iff \beta x-\beta x_A - \alpha y +\alpha y_A=0$ $\iff ax+by+c=0~~~~$ avec $a=\beta$ , $b=-\alpha$ , $c=-\beta x_A +\alpha y_A$ On a donc prouvé qu'il existe trois réels $a, b , c$, dont $a$ et $b$ non tous les deux nuls (pour que le vecteur directeur ne soit pas nul), tels que $M(x;y)\in(\Delta) \iff ax + by + c=0$ On appelle cette équation uen équation cartesienne de $(\Delta)$
H
Droites parallèles et droites sécantes : (Vidéo 8)
Propriété 1 :
Dans un repère, la droite $(d)$ a pour équation réduite $y=mx+p$ et la droite $(d')$ a pour équation réduite $y=m'x+p'$ • $(d)\parallel(d') \iff m=m'$ • $(d)$ et $(d')$ sécantes $\iff m\neq m'$
Démonstration : àvenir !!
Propriété 2 :
Autre formulation du théorème : Deux droites non parallèles à l'axe des ordonnées sont parallèles si et seulement si elles ont le même coefficient directeur.
Méthode :
On donne dans un repère les droites suivantes : $(d_1) : y=2x+3$ ; $(d_2) : y=-2x+3$ ; $(d_3) : x=7$ ; $(d_4) : 2y=4x+8$ ; $(d_5) : y+2x=5$ Lesquelles sont parallèles entre-elles ?
Correction : On transforme les équations pour les replacer dans les schémas du cours : $(d_1) : y=2x+3$ ; $(d_2) : y=-2x+3$ ; $(d_3) : x=7$ ; $(d_4) : y=2x+4$ ; $(d_5) : y=-2x+5$ on obtient donc :$m_1=m_4=2$ donc $(d_1)\parallel(d_4)$ et $m_2=m_5=-2$ donc $(d_2)\parallel(d_5)$
Propriété 3 :
Soit $(d)$ une droite du plan d'équation : $(d) : ax + b y + c = 0$ avec $(a;b)\neq(0;0)$ Le vecteur $\vec u \begin{pmatrix}-b\\a\end{pmatrix}$ est un vecteur directeur de la droite $(d)$
Exemple 1 :
Soit $(d)$ la droite d'équation $(d) : 2 x + 3 y - 5 = 0$ . On a donc : $a=2$ et $b=3$ donc $(d)$ admet pour vecteur directeur : $\vec u \begin{pmatrix}-3\\2\end{pmatrix}$
Propriété 4 :
Dans un repère orthonormé, soit la droite $(d)$ d' équation $ax+by+c=0$ et la droite $(d')$ d' équation $a'x+b'y+c=0$ avec les $(a;b)\neq (0;0)$ et $(a';b')\neq(0;0)$ On a alors : $$(d)\parallel(d') \iff ab'-a'b=0$$
Démonstration : à venir
Méthode :
Soit $(d_1)$ la droite d'équation : $3x-2y+4=0$ et $(d_2)$ la droite d'équation : $-6x+4y-1=0$. Les droites $(d_1)$ et $(d_2)$ sont-elles parallèles ?
Correction : Première démonstration : On applique directement la propriété préc"dente : Dans un repère orthonormé, soit la droite $(d)$ d' équation $ax+by+c=0$ et la droite $(d')$ d' équation $a'x+b'y+c=0$ avec les $(a;b)\neq (0;0)$ et $(a';b')\neq(0;0)$ On a alors : $(d)\parallel(d') \iff ab'-a'b=0$ ici : $a=3$ ; $b=-2$ ; $a'=-6$ et $b'=4$. On calcule $ab'-a'b=3 \times 4- (-6) \times (-2)=12-12=0$ On a donc bien $(d_1)\parallel(d_2)$ Deuxième démonstration : Il s'agit de refaire la démonstration, qui n'est pas longue, pour s'épargner d'apprendre la propriété précédente par coeur. L'idée étant de comprendre plutôt que d'apprendre !! On cherche $\vec{u_1}$ un vecteur directeur de $(d_1)$ et $\vec{u_2}$ un vecteur directeur de $(d_2)$ On sait d'après le cours que si $(d)$ une droite du plan d'équation : $(d) : ax + b y + c = 0$ avec $(a;b)\neq(0;0)$ alors le vecteur $\vec u \begin{pmatrix}-b\\a\end{pmatrix}$ est un vecteur directeur de la droite $(d)$ $\bullet$ Pour $(d_1)$ : $a=3$ et $b=-2$ donc $\vec u_1 \begin{pmatrix}2\\3\end{pmatrix}$ $\bullet$ Pour $(d_2)$ : $a=-6$ et $b=2$ donc $\vec u_2 \begin{pmatrix}-2\\-6\end{pmatrix}$ On vérifie si ces deux vecteur sont colinéaires en calculant leur déterminant : $Det\left(\vec u_1,\vec u_2\right)=\begin {vmatrix}3&-6\\-2&2\end{vmatrix}=12-12=0$ $(d_1)$ et $(d_2)$ ont donc des vecteurs directeurs colinéaires, elles ont donc la même direction. On a donc bien $(d_1)\parallel(d_2)$
Établir que trois points sont alignés, non alignés :(Vidéo 12)
Propriété 1 :
On dit que 3 points A, B et C sont alignés si et seulement si les droites (AB) et (AC) ont le même coefficient directeur.
Exemple 1 :
Dans un repère (O,I,J), on donne trois points $M(-1;4) ; N(3 ;-4) et P(2 ;-2)$ Les points M, N et P sont-ils alignés ?
Correction : On vérifie que $x_M\neq x_N$ Donc la droite (MN) a pour coefficient directeur $m_1=\dfrac{y_M-y_N}{x_M-x_N}=\dfrac{4-(-4)}{-1-3}=-\dfrac{8}{-4}=-2$ de même, on vérifie que $x_M\neq x_N$ Donc la droite (MP) a pour coefficient directeur $m_2=\dfrac{y_M-y_P}{x_M-x_P}=\dfrac{4-(-2)}{-1-2}=-\dfrac{6}{-3}=-2$ On constate que $m_1=m_2$, donc les droites (MN) et (MP) ont donc le même coefficient directeur. En application de la propriété pédécente, les points M, N et P sont donc alignés.